Bu projede endüstriyel robotları programlamak için tasarlanan RobotStudio programını kullanarak bir palet dizme uygulaması yaptım. Bu uygulama simülasyonda konveyörden gelen ürünleri palete dizerek paletleme işlemini gerçekleştiriyor. Projenin çalışma şekli alttaki videodan görülebilir.
Robotu programlamadan önce “SmartComponent” oluşturarak konveyör ve vakum aletinin çalışma şekillerini simüle etmemiz gerekiyor.
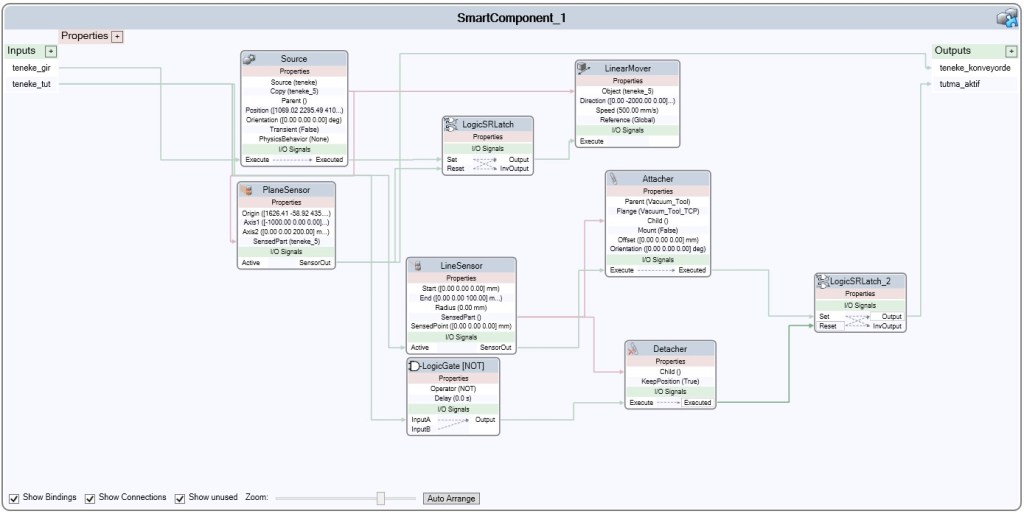
Smartcomponent dizaynını şekildeki gibi yaparak konveyörden parça ilerlemesi ve gerekli sinyal gönderildiğinde vakum aletinin parçayı tutması sağlanıyor.
Daha sonra gerekli sinyaller “controller”a eklenerek robotun program esnasında komutlar göndereceği sinyaller belirlenmiş oluyor. “VAKUM”,”DEVAM”,”YENI_PARCA” sinyalleri ekleniyor.
Daha sonra robotun RAPID kodu yazılarak ve noktalar belirlenerek robotun hareket sırası ve hareket özellikleri belirleniyor. Bu uygulamada dizme olduğu için bırakma noktasını her yeni parçada ötelemek gerekiyor. Bunun için de for döngüleri kullanılıyor.
WaitDI BASLA,1;
FOR z FROM 0 TO 1 DO
FOR y FROM 0 TO 2 DO
FOR x FROM 0 TO 3 DO
SetDO YENI_PARCA,1; !yeni parça gelmesi için puls sinyal gönderiliyor.
WaitTime 0.5;
SetDO YENI_PARCA,0;
MoveL home,v2000,z10,Vacuum_Tool_TCP\WObj:=wobj0;
WaitDI DEVAM,1;
MoveL teneke_alma_nok,v2000,z10,Vacuum_Tool_TCP\WObj:=palet_wobj;
WaitTime 0.5;
SetDO VAKUM,1;
MoveL home,v1000,z10,Vacuum_Tool_TCP\WObj:=wobj0;
birakma_origin_nok_offs:= Offs(birakma_origin_nok,x*254,y*203,z*301);
yaklasim_nok:= Offs(birakma_origin_nok_offs,0,0,240);
MoveL yaklasim_nok,v2000,z10,Vacuum_Tool_TCP\WObj:=palet_wobj;
WaitTime 0.5;
MoveL birakma_origin_nok_offs,v500,z10,Vacuum_Tool_TCP\WObj:=palet_wobj;
WaitTime 1;
SetDO VAKUM,0;
WaitTime 0.5;
MoveL yaklasim_nok,v2000,z100,Vacuum_Tool_TCP\WObj:=palet_wobj;
ENDFOR
ENDFOR
ENDFOR
MoveL home,v1000,z100,Vacuum_Tool_TCP\WObj:=wobj0;