Üçüncü uygulama için Factory I/O içerisinde “Assembler(Basic)” olarak adlandırılmış “pick and place” kullanarak 2 parçanın birleştirilme senaryosunun Siemens S7-1200 PLC programını yazdım. Programın istenen çalışma şeklini aşağıdaki videodan görebilirsiniz.
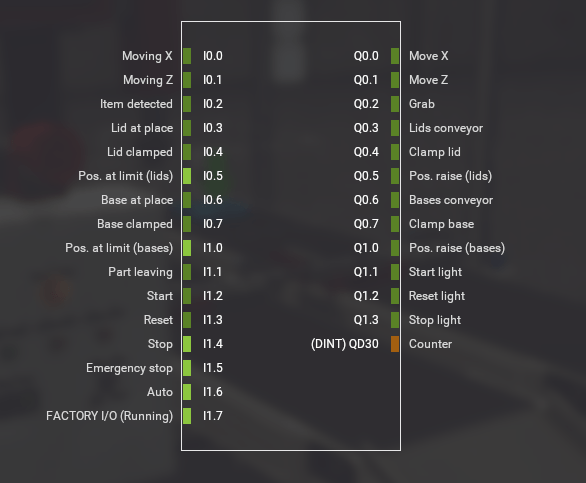
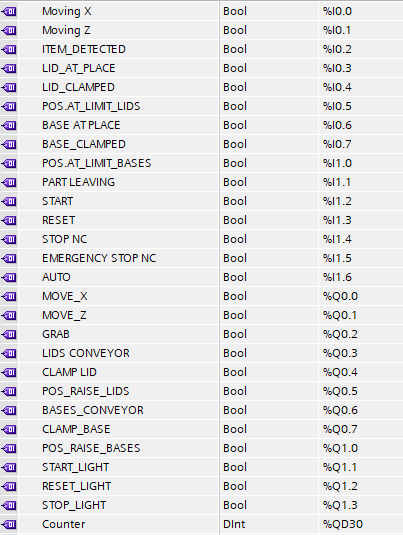
Etiket tablosu ve Factory I/O üzerindeki giriş-çıkış bağlantılarını aşağıdaki şekilde yaptım.
Programın yazımına geçersek bu programı yazarken her network bir adımı temsil edecek şekilde program yazımını gerçekleştirdim. Her adım bir önceki adımı resetleyecek şekilde tasarladım. Her networku açıklayarak bu yazımı tamamlayacağım.
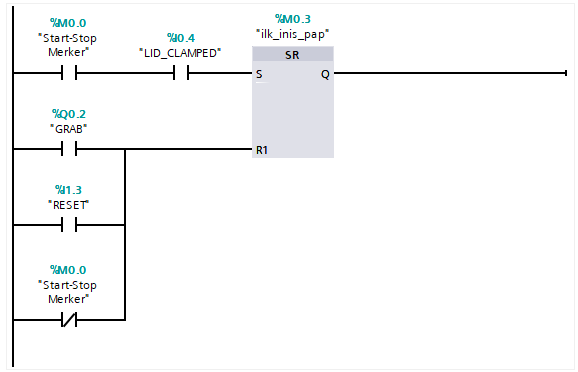
Network1

İlk network sistemin çalışma durumunu kontrol etmek için yazıldı. Auto modda starta basılı iken set olucak ve stop veya resete basılmadığı sürece set olarak kalıcak. M0.0 durumuna göre sistemin durum ışıkları yanacak.
Network2
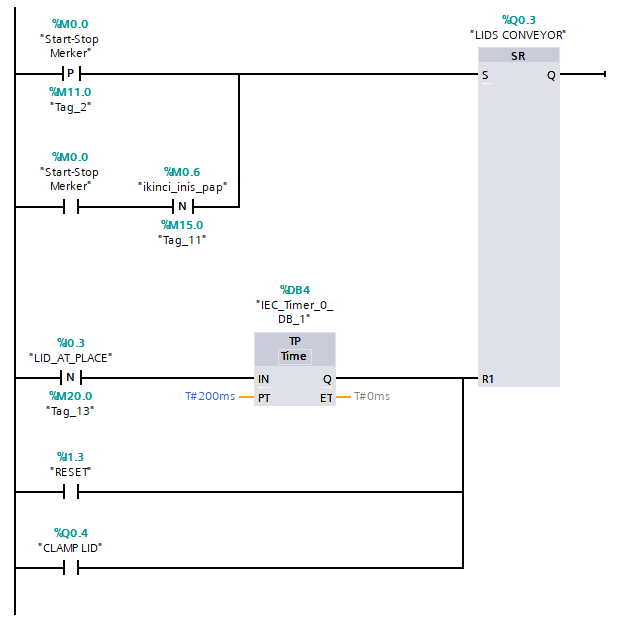
Bu network’de “Lid” parçasını taşıyan konveyörün çalışma durumunu yazdım. M0.0 ile yada otomatik modda ise önceki çevrimin son adımı ile aktif olacak. “Lid” olması gereken konuma(kelepçenin içine) geldiğinde deaktif olacak.
Network3

Bu network’de “Base” parçasını taşıyan konveyörün çalışma durumunu yazdım. M0.0 ile yada otomatik modda ise önceki çevrimin son adımı ile aktif olacak. “Base” olması gereken konuma(kelepçenin içine) geldiğinde deaktif olacak.
Network4
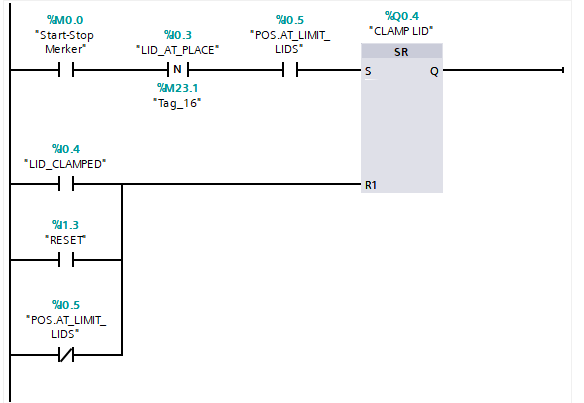
Bu networkde “Lid” kelepçenin içine geldiğinde kelepçeyi kapatacak olan Q0.4 aktif olacak. Kelepçe “Lid’i” olması gerektiği yere pozisyonladıktan sonra deaktif olacak.
Network5

Bu networkde “Base” kelepçenin içine geldiğinde kelepçeyi kapatacak olan Q0.7 aktif olacak. Kelepçe “Base’i” olması gerektiği yere pozisyonladıktan sonra deaktif olacak.
Network6
Bu adımdan sonra “pick and place” kısmının programını yazdım. “Lid” kelepçesi işlemini tamamladıktan sonra kol aşağı inecek. Yakalama işlemini yaptıktan sonra deaktif olacak.
Network7
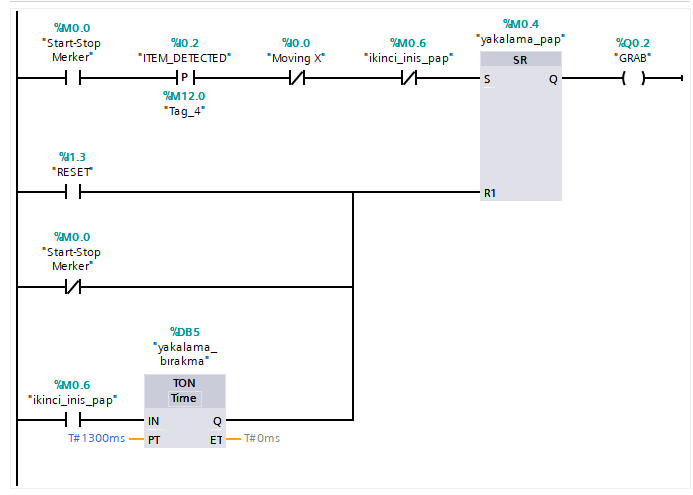
İlk inişten sonra I0.2 ile parça sensör tarafından görüldüğü anda yakalama aktif olacak. İkinci konveyörde kol aşağı indikten sonra deaktif olacak.
Network8

Yakalama işlemi aktifken ve kol aşağı inme işlemi tamamlandıktan kol x ekseninde diğer konveyörün üstüne gelecek. Birleştirme işlemi tamamlanıp kelepçe kaldırıktan sonra deaktif olacak ve orjine geri dönecek.
Network9

Bu network’de “pap” ileri konumdayken kol aşağı inecek ve yakalama işlemi bitene kadar aktif kalacak.
Network10

Bu network’de Q0.1’in aktif olacağı durumları birleştirdim. 2 farklı networkde aynı çıkışı kullanamadığımız için.
Network11
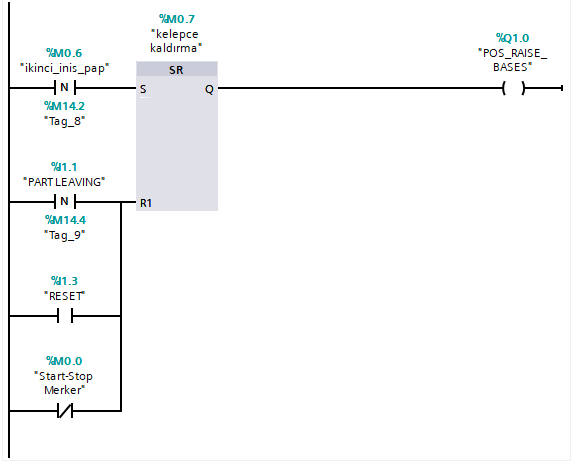
İkinci iniş tamamlandıktan sonra kelepçe kalkacak ve birleştirilmiş parçaların geçişine izin verecek. Parça çıkış sensörü tarafından görüldükten sonra kelepçe eski konumuna geri dönecek.
Network12
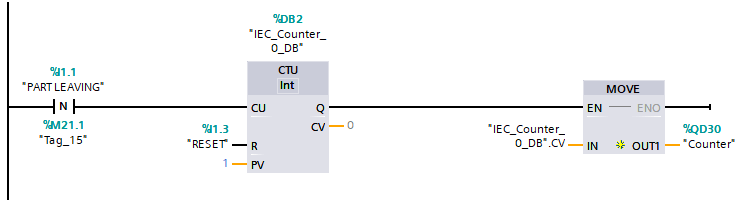
Birleştirilmiş parçalar çıkış sensörü tarafından sayılarak, değer sayıcı ekranına aktarılıyor.
Yukarıda yazılan programı indirmek için mail ile iletişime geçebilirsiniz.
